Hello all!
Today I wanted to share how I made my network, connecting together my base LAN at my flat together with other devices outside it and other sites, or virtual locations.
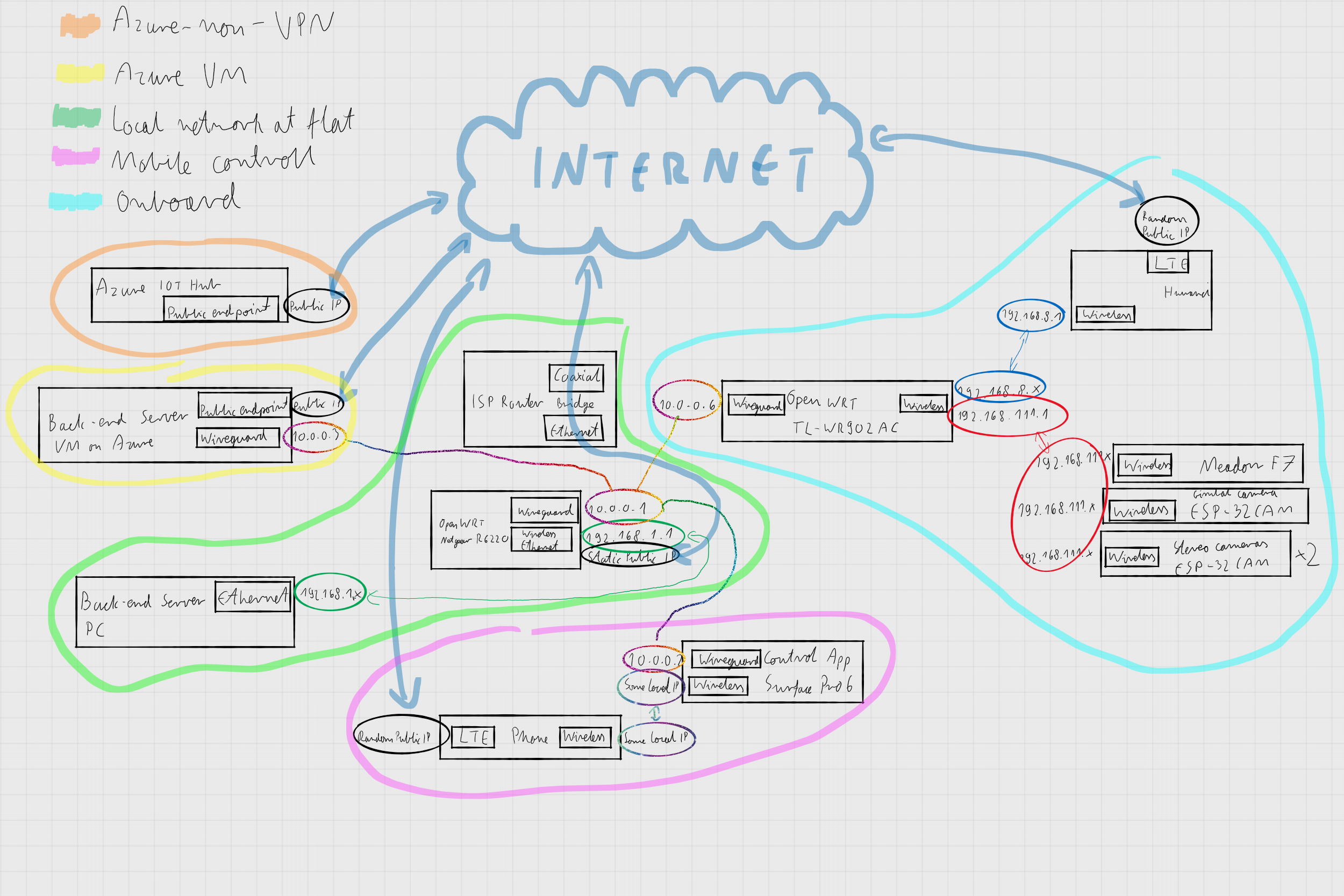
Picture on the right shows map of target network that will be finished soon, for now I’m lacking few elements. The map is centered around my WnekoTank Rover project, so it’s also missing many elements, but general topology is there and I’ll cover all the details in following descriptions of each part.
I decided on such “star” architecture as, first of all, I have static IP address at my flat, so it’s easy to configure all “clients” to connect to it, and also makes configuration easier, all other devices have to route local traffic just here and only here is it spread around. Configuring it in a “mesh” would be just much more complicated, as for example to connect from laptop (on mobile connection) to my Rover would require checking public IP first and changing configuration accordingly, or using some DDNS service, also each device would need to have separate WireGuard and routing configuration for each other device. Compared to that having central hub with static public IP makes everything much easier.